We are happy to announce that Release 23.12 is now available for your ANYmal.
Here, you will find additional information about what we have introduced and changed. You’ll find several quality of life improvements within ANYbotics Field Operator app and from a few under the hood improvements to improve safety. Most notably, Operators can look forward to:
- Mitigations for edge case failures for stair climbing
- Easier monitoring of ANYmal during autonomous operation in the app
- A graphical interface for managing ANYmal Software on the OPC
Note that this release comes with an additional step to complete the upgrade. Please run sudo apt install anymal-pc on LPC and NPC. Do not install this on OPC. Please reach out at support.anybotics.com if you require assistance.
Note that this release additionally comes with an optional ANYdrive firmware update. Please refer to the Operator’s Manual for instructions on how to perform this update.
You can find the technical release notes here and updated SDK documentation here.
New Features
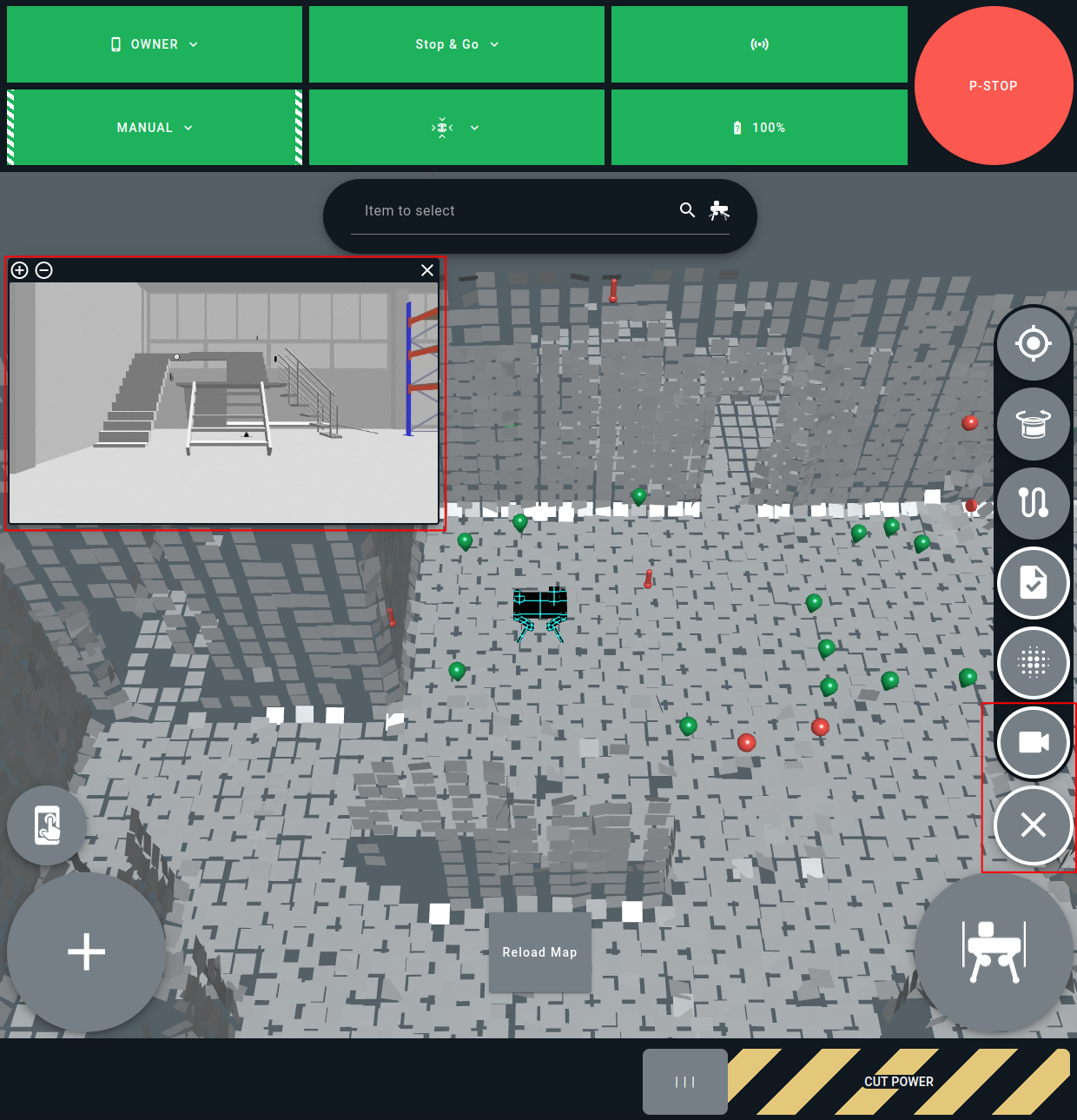
Zoom Camera feed now available in the Map Screen on Workforce Field Operator
Operators now have the option to toggle the zoom camera stream from the Map view in the ANYbotics Field Operator app. Operators will be able to watch from ANYmal’s perspective during its current mission in order to maintain situational awareness, such as where ANYmal is within its environment.
Graphical Installer for ANYmal Software management
We have introduced a new Graphical Installer to help Operators manage ANYmal software on their OPC. You can download it here. Using this tool, you can completely set up a new OPC with all local ANYmal software (GUI, ads_local, etc) and install helpful utilities to work with ANYmal without needing to use the Command Line Interface and manual commands. Additionally, you can simplify the upgrade of your ANYmal Software Release, such as this one.
ANYmal will now go to Rest after a failed docking attempt
In the event that ANYmal is unable to successfully dock, such as during power loss at the charger, ANYmal will now transition to Rest instead of simply standing in front of the charger until its power runs out, thereby preventing collapses. Note that ANYmal will go to Rest, not Sleep, implying that drives will not turn off and will remain localized, until the battery is drained.
New ANYdrive Firmware Update
There is now a new optional ANYdrive Firmware available. We have improved how ANYdrives measure their temperature, improving their accuracy, allowing us to decrease our margin of safety on the drive. ANYmal will now be able to operate in higher ambient temperatures than before. Additionally, there are minor improvements to some low level logic. You can find instructions on how to update ANYdrive Firmware here.
Important Changes
Improved Stair Climbing NFM Presets
Using our vigorous testing standards and known difficult data sets, we have slightly tweaked our NFM presets for stair_climbing to improve handling of certain edge cases. Operators should not see any significant performance change on stairs, except in edge cases where it should improve a bit. In an abundance of caution, Operators can first test the stairs with a rope attached to ANYmal if they wish.
Near Field Mapping (NFM) Health Check
In rare occurrences, NFM could be in an unhealthy state. This is particularly dangerous if it occurs when ANYmal is transitioning to stair_climbing and thus cannot properly “see” the stairs. If NFM is in this unhealthy state, in the best case, this leads to ANYmal knocking its legs into the stairs on its way up. Worst case, it could tumble down the stairs.
In this release, ANYmal will now perform a health check on the status of NFM, and if it is not healthy, ANYmal will not continue onto the stairs and the Operator will receive a warning through the GUI or ANYbotics Field Operator app to choose how to proceed. In the event of autonomous operation, ANYmal will consider the navigation failed, and move on according to the mission definition.
Workflow Changes
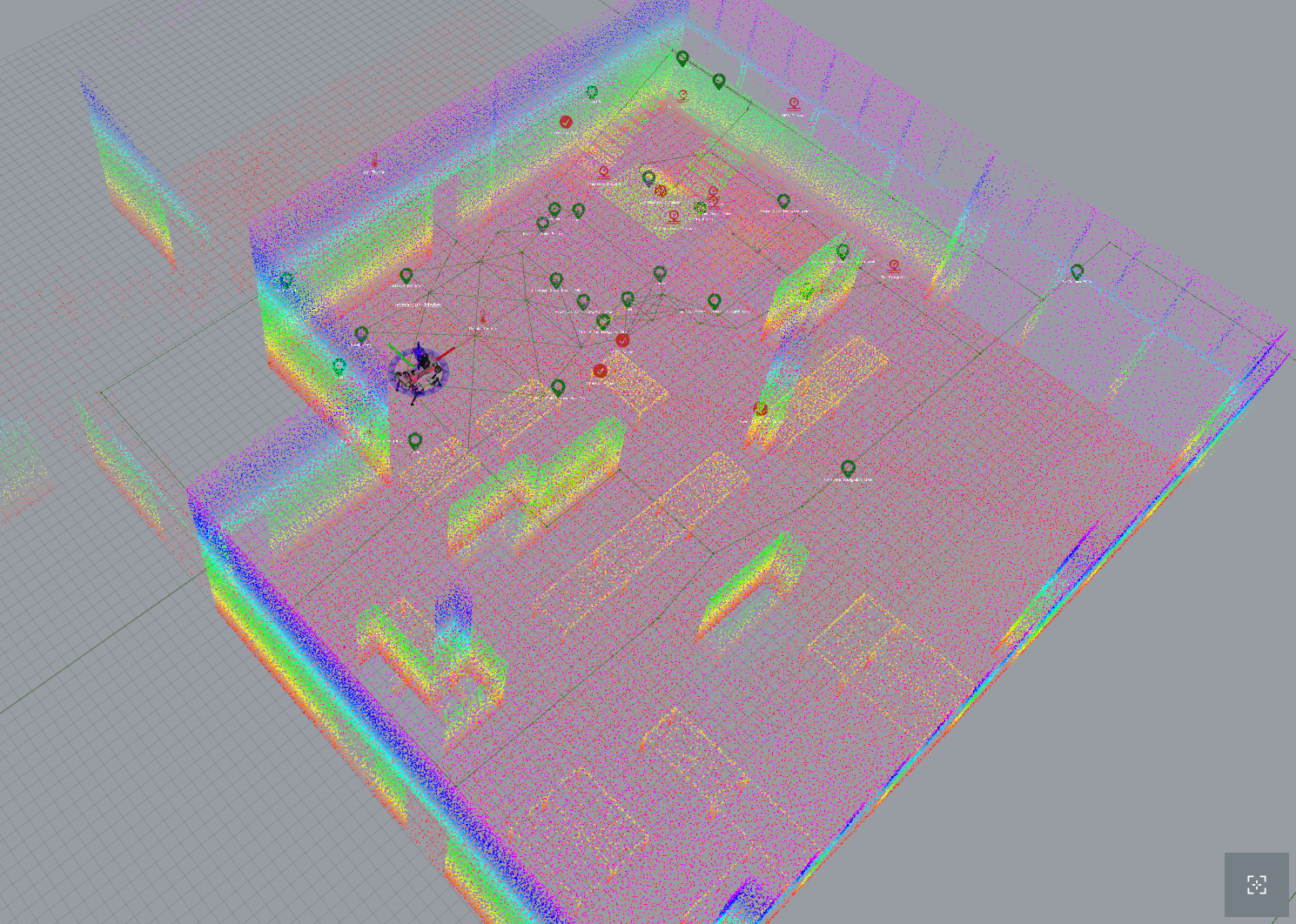
SLAM Point Cloud display now on by default
When displaying the point cloud ANYmal generated during mapping, Operators no longer need to go into the Displays tab in the 3D Visualization menu to toggle on SLAM. After the Publish Map button is clicked, the map will now display once it is ready. Note that the visualization has additionally been updated to be colorized by height, instead of all black. It should now be easier to differentiate between floors in a large map.
Inspection payload feature toggle now on by default
When working in simulation, Operators would normally have to enable the inspection_payload feature toggle manually or change to a known robot configuration to use the payload in simulation. Now, the default ANYmal D configuration has inspection_payload enabled, requiring one less click from an Operator to start up a fully featured simulation.
Bug Fixes
Aligned Global and Local planning obstacle detection
Previously, Global Replanning and Local Planning had different definitions about where a detected obstacle was determined to be. In certain cases, this could cause ANYmal to remove the wrong edge from the calculation of available routes when attempting to globally replan. This error resulted in an infinite loop of planning attempting to use the actually obstructed edge, which had not been removed. By aligning the definitions between the two planning systems, ANYmal will now correctly eliminate the edge that is blocked by an obstacle and avoid the infinite loops that causes the robot to be stuck.
Introduced a limit on number of Global Replanning attempts ANYmal will perform
In a similar vein, there is now a limit to how many times ANYmal will attempt to perform Global Replanning, in case there are any other edge cases where ANYmal would end up in an infinite replanning loop. In any given Navigation Task, ANYmal will now attempt a maximum of 50 tries to achieve its navigation goal.