We are happy to announce that Release 23.09 is now available for your ANYmal.
Here, you will find additional information about what we have introduced and changed. You’ll find several quality of life improvements within our Localization system and from a few under the hood improvements. Most notably, you can look forward to:
- Significantly improved localization, both during the mapping process and operation
- New options for creating Environment Objects, enabling faster setup in simulation, thus lowering deployment time on site
- An evolution of our Control Lease Mechanism, improving safety and clearer control authority
Note that this release additionally comes with a PDB update. Please refer to the Operator’s Manual for instructions on how to perform this update.
New Features
New Control Lease/Control Authority
We are introducing a significantly improved version of our control lease mechanism that further defines who is in control of the robot at any given moment by decoupling the concept of “who is in control” and “who is sending commands”.
Now, only one device can have control authority at a time, such as the Graphical User Interface (GUI), ANYbotics Field Operator app, or via API . Then, the Control Authority can toggle between Manual and Auto control. Manual will allow you to directly control the robot, while Auto will allow you to send autonomous commands to ANYmal.
The difference is that now, it is explicit which control authority can send autonomous commands. In the current system, if ANYmal was in Auto, both the app, the GUI, and its API endpoint could send autonomous commands to ANYmal.
To use this, take control authority on the device you wish to use. (Note that the hierarchy of control still exists, i.e. GUI cannot take control from the app, it must be released first.) Then, select the the mode you wish to control ANYmal in (Auto or Manual). Now, send the desired command for ANYmal to execute.
You can find more details here.
anymal-router supercedes anymal_router_utils
We have deprecated our existing package anymal_router_utils, and replaced it with a more complete and powerful anymal-routerpackage. For more details on how to use it, please refer to the Operator’s Manual.
ANYdrive Firmware Update Command Line Interface
There is now a new ANYdrive firmware update method via the command line interface that will update all drives at once, superseding the original method using ANYdrive Studio. Now, you only need to connect ANYmal to the internet, and run the below command on LPC, then wait for the firmware update to complete.
anydrive-firmware-cli update –interface enp6s0
Detailed information can be found in the Operator’s Manual.
ANYmal API 0.6 Released
If you are developing against the ANYmal API and SDK, please take a look at the relevant release information in the Software Manual. There is now a new endpoint for the API to take control authority. We have also introduced the ability to start missions from a specific task within the mission, instead of starting at the beginning every time.
Further details on how to use these new features can be found in the API documentation.
Important Changes
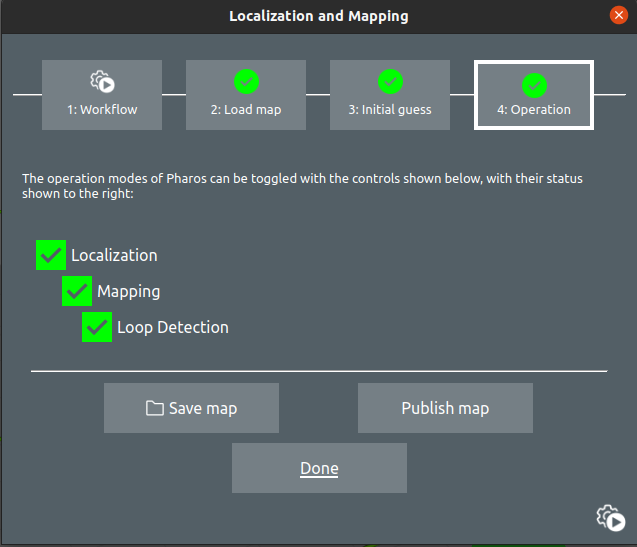
Loop Detection
For complex environments that ANYmal must operate in, we are happy to announce a new and improved Loop Detection system. Loop Detection when mapping is now significantly more robust and reliable, allowing ANYmal to correct for accumulated errors that may have occurred while mapping a large facility and then returning to its original location from a different direction. Simply enable Mapping and Loop Detection from the Mapping window in the Graphical User Interface (GUI).
While mapping, walk ANYmal around the loop, ensuring that ANYmal has fully completed the loop. Visualize the map after mapping to verify the accuracy of the map. Then save and continue with building the environment.
Improved SLAM in Low Feature Environments
Additionally, ANYmal now has more robust localization in low feature environments, such as long corridors or open fields. You will now see more accurate maps during the mapping process, and ANYmal will less frequently lose localization when in these environments, leading to a more robust system throughout.
Improved Time Handling without Internet Access
There have been an increasing number of cases where the PCs in ANYmal will lose track of time, reverting to a seemingly random, but consistent, date in the past. From a previous release, ANYmals connected to the internet will automatically correct their time by syncing with a publicly available time server. However, unconnected ANYmals still face this problem.
While it is impossible to get an accurate time, ANYmal will now save the current time at the last shutdown. If the new time at boot is later than this time, then time tracking is still good, and nothing changed. However, if the time has reverted, then time on ANYmal will simply increment from this previously saved time. While this may not be accurate, it will at least alleviate most of the major concerns regarding ANYmal losing time, such as logs, reports, and telemetry data.
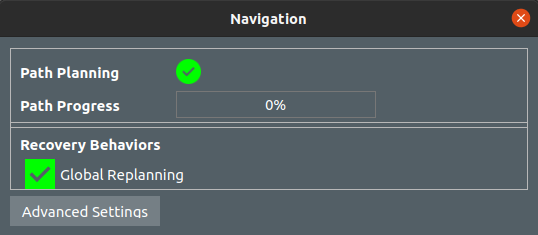
Global Replanning
Global Replanning is now enabled by default, ensuring that ANYmal will attempt to take corrective action should it detect an obstacle in its path. Previously, Operators had to remember to enable this feature upon every boot of ANYmal. This should reduce the risk of ANYmal simply getting stuck somewhere.
Gas Sensor Dangerous Levels Notifications
ANYmals with gas sensors will now receive a pop up notification if the measured concentration crosses a set threshold, It will be easier for Operators to see dangerous concentrations of gas without having to continuously monitor the ANYmal. ANYmal will notify Operators on both the ANYbotics Field Operator app and the Graphical User Interface (GUI).
Known Issues
Robot Wide Angle Camera Compability
Some robots are affected by a change introduced to our start up systems that prevent the Wide Angle Cameras from connecting. Robots affected are D030-D055.
If you have one of these robots, please reach out to us at support.anybotics.com and we will correct the configuration of your robot.
Workflow Changes
Environment Editors New Options
Operators have new options for creating environment objects from the Graphical User Interface (GUI). First, you can create a navigation goal by using the interaction marker to indicate the position. Simply move the marker to the location you wish to create a navigation goal. Then, when creating a goal in the Environment Editor, simply hit Marker. The position and orientation should now update.
Additionally, you can use the Publish Point tool from the 3D Visualization panel to select the point where you want to place an inspection point. To edit the position of an inspection point, click Listen in the Environment Editor while editing an inspection object. Then, select Publish Point under the Tools drop-down in the 3D Visualization. Lastly, select where you want the inspection point.
Improved Local Infrastructure ADS Installation
For Operators who are looking to stand up their own ADS installation, you will find updated instructions in the Operator’s Manual. The install is now simpler, requiring fewer steps on local infrastructure.
Bug Fixes
Pausing Mission in Various Mission States
ANYmal will no longer change to stand mode when its mission is paused while in motion state crawl. Similarly, an issue that could cause ANYmal to fall on stairs during a mission pause has been fixed.