We are happy to announce that Release 23.05 is now available for your ANYmal. You will find additional information about what we have introduced and changed here. You’ll find several quality-of-life improvements within ANYbotics Workforce from a few under-the-hood improvements.
New Features
ANYbotics Workforce updates
An important safety feature has been added to ANYbotics Field Operator app, enabling Operators to display the color-coded readings from the gas sensors on the Map Visualization. To do so, simply toggle the Gas Toggle from the Map Visualization page. Now you will see the real-time gas measurement indicators generated as ANYmal navigates your facility as long as the app is connected to your ANYmal.
ANYbotics Workforce updates
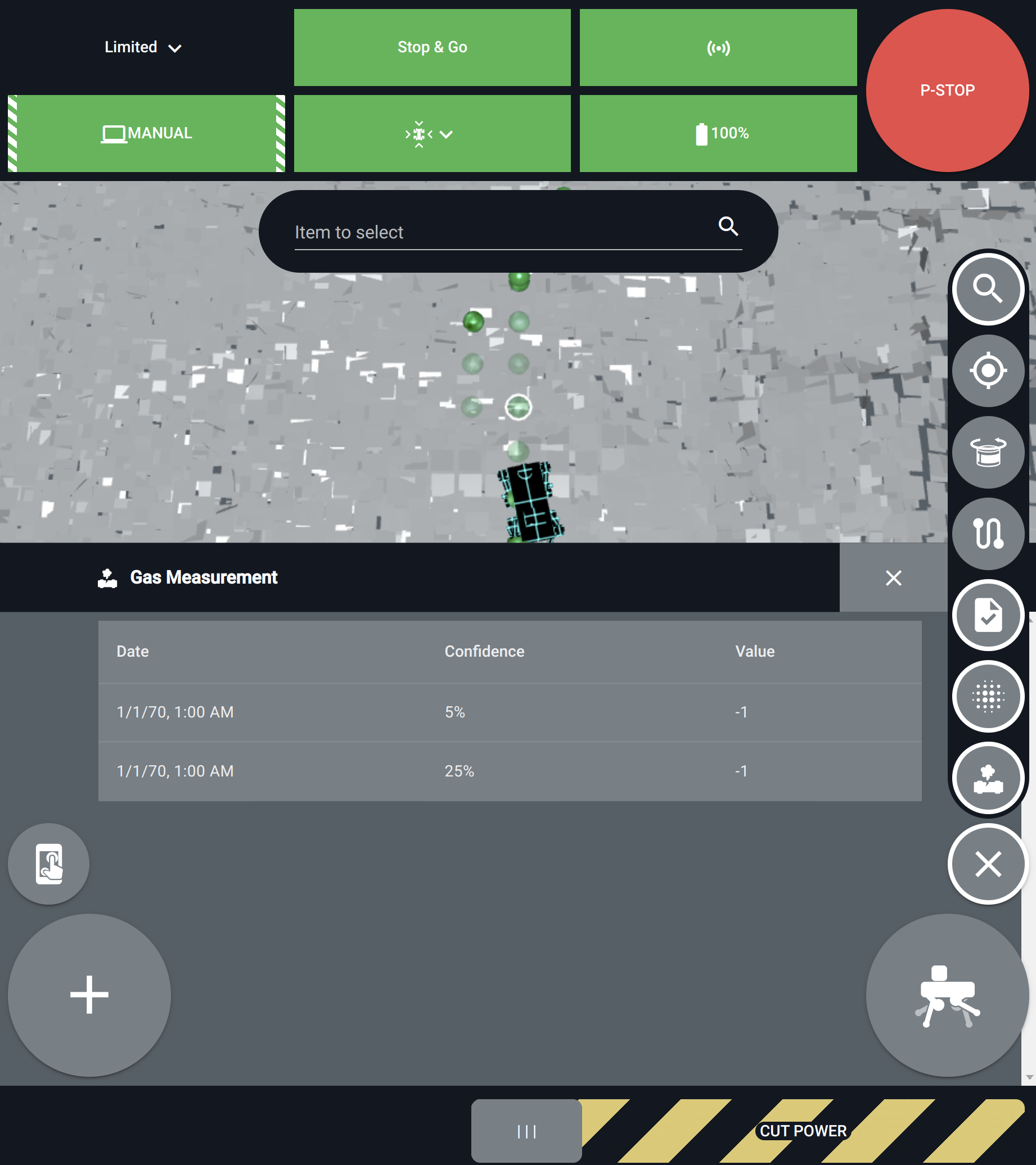
Further, Operators can now select any gas inspection points from the overlay on the 3D map in order to see a history of measurements at that location. This is available both in Workforce and the Operator GUI.

ANYbotics Workforce updates
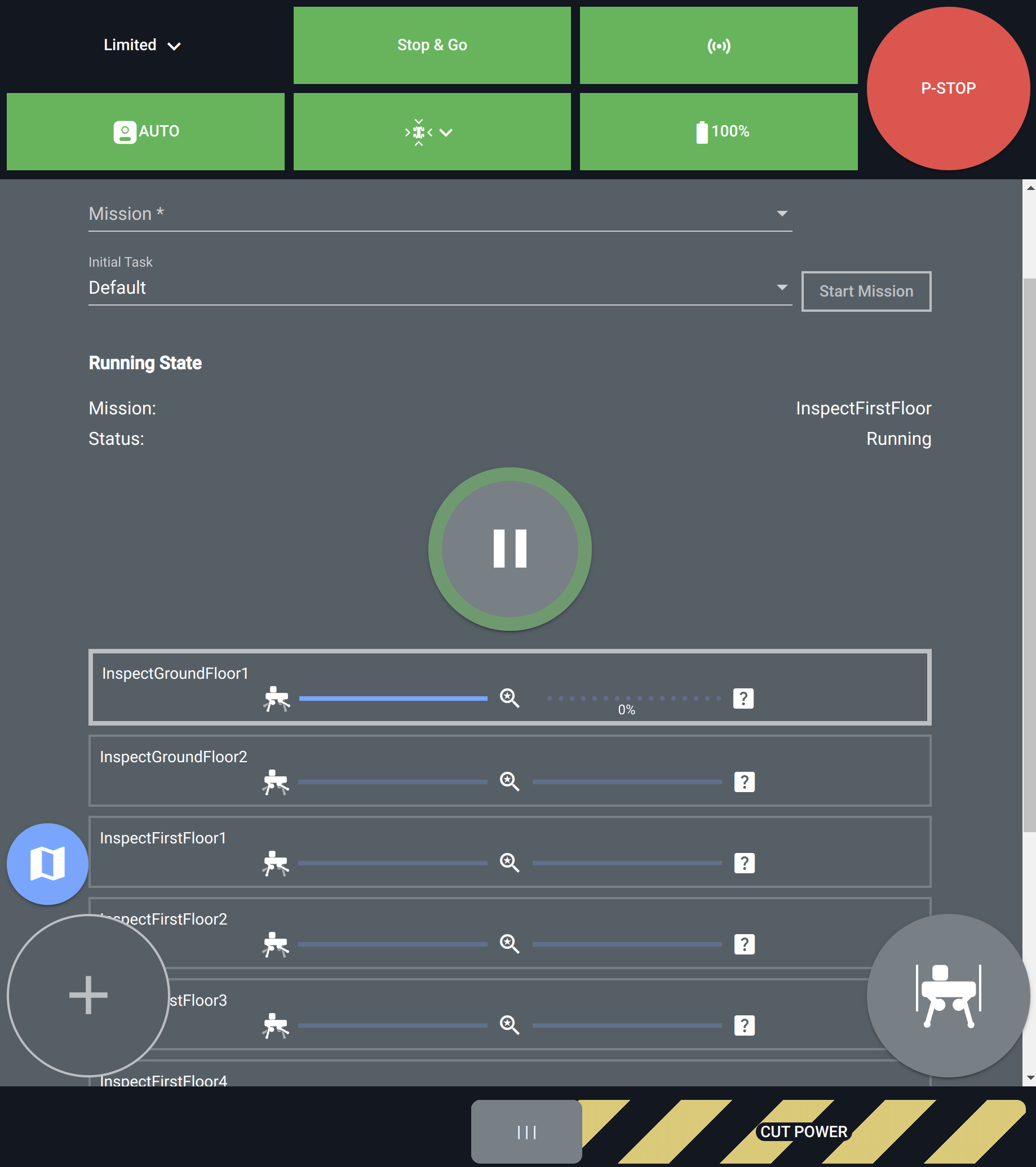
Additionally, tracking mission progress with Workforce has been introduced. The completed, current, and upcoming tasks will now be shown on the mission player page allowing Operators to track mission progress without using the laptop-based ANYmal GUI.
Improved ANYmal Diagnostics
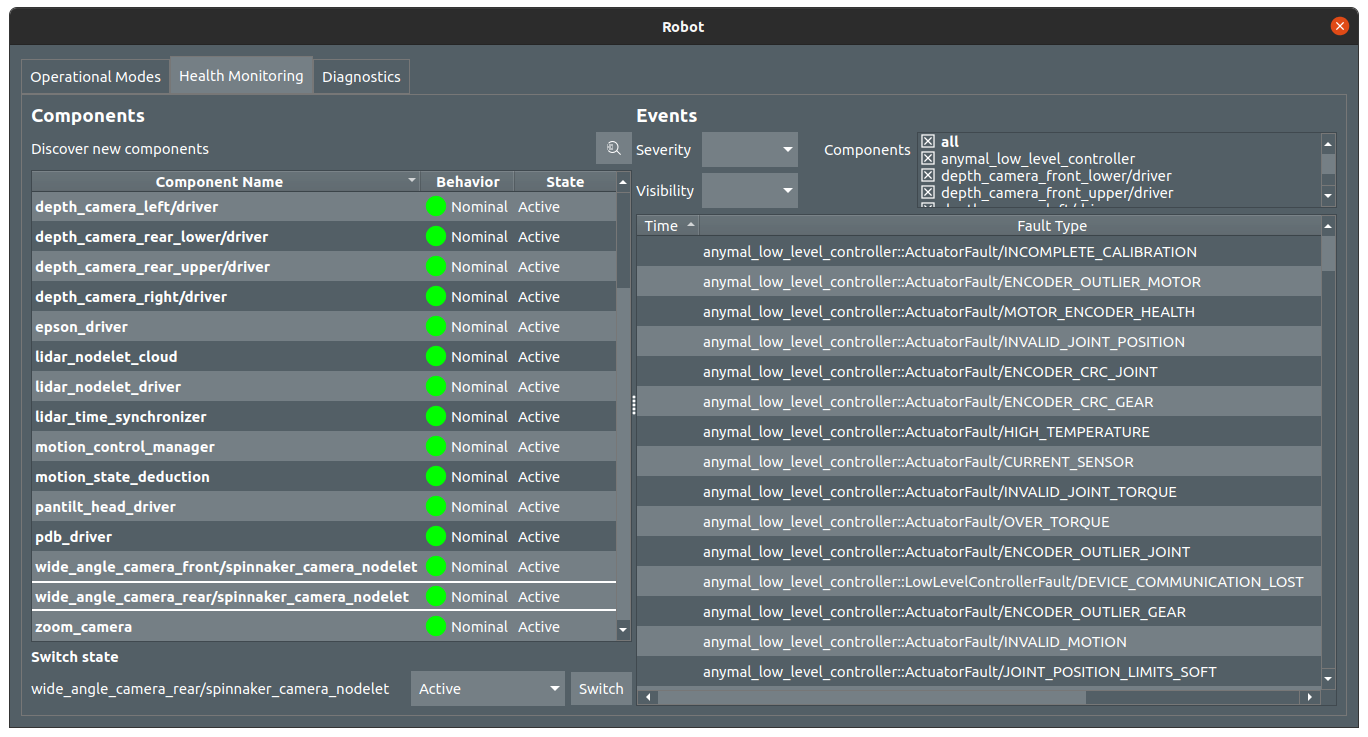
We continue to improve our diagnostics reporting, now giving you more options and control over more sensors. Operators will now have easier insight into the health of their ANYmal, enabling easier diagnosing of any issues that may arise. Note that you will need to enable the diagnostic_mode feature toggle to activate and deactivate sensors.
ANYmal API 0.5 Released
If you are developing against the ANYmal API and SDK, please take a look at the relevant release information in the Software Manual.
Important Changes
Increased Stop & Go distance to an Obstacle

In Stop & Go mode, ANYmal will now, in autonomous operation, stop for any obstacles found within a 1m square in front of its face, causing ANYmal to now stop up to 1m in front of the obstacle, instead of the previous 30 cm distance. By increasing this stopping distance, ANYmal will now have a greater safety margin when handling potential unexpected hazards during its missions. Note that in manual operation, the 30 cm stopping distance remains.
Please note how this might affect certain edges within your waypoints graph, especially if you were relying on a short stopping distance in tighter situations. We recommend that you use the scenario narrow if required.
If you have a particularly complex situation, we encourage you to reach out to us at Support for further advice.
Additionally, we have also improved ANYmal’s collision checks in general, now using ANYmal’s entire footprint, instead of just its contours. You should now have improved reliability for Stop & Go during autonomous operations.
Removal of Obstacle Avoidance
The collision avoidance mode Avoid Obstacles has been removed. In environments where Avoid Obstacles was specified, these edges will now revert to Stop & Go behavior. We have found that the reliability of this mode is not sufficient, so it will be disabled until an upgraded version is available. We apologize for any inconvenience caused.
Improved Torso Control
The Torso Control motion state now has an improved controller under the hood. ANYmal is now more responsive, enabling faster mapping and better manual control.
Workflow Changes
Waypoint Editor Improved
The Waypoints Editor now has more consistent and intuitive use regarding single and double-edge modes. Most importantly, selecting a single edge while in double edge mode will no longer automatically create the second edge.
SLAM in Simulation
We have improved the SLAM backend of the simulation, enabling you to use the full power of our SLAM system in the sim. In practice, you no longer need to specify the feature toggle SLAM to real. You can now, by default, visualize point clouds, build maps, and localize within maps using the full system, instead of a very resource-intensive simulated SLAM system.
Docking Station Fixed now functional at boot
If you have set a fixed docking station in your environment, ANYmal will now use this information to localize upon its first mission starting from the docking station. Previously, this information was only utilized after ANYmal had performed the Docking motion state after localizing.
Operators should now see improved initialization of a mission immediately upon boot, reducing the number of situations where manual intervention is required.
Improved Time Synchronization if available
By default, ANYmal’s PCs will now attempt to synchronize their time to an external server, if available (such as by having an internet connection). If successful, the time that ANYmal uses will be accurate, having small but significant effects throughout the whole system. For example, timestamps in the report will now be accurate, OPC time will no longer be offset, and more.
However, time must be synced before ANYmal boots its software stack, so it must be given time to do so. This change potentially adds up to 30 seconds to ANYmal’s boot time.
Bug Fixes
NPC Clock Synchronization
We have fixed a bug where, if the time on NPC was synced incorrectly, it would generate many empty log files, clogging up the filesystem. These empty files are safe to delete.
Auditive Inspection now correctly moves the payload
The payload will now correctly point towards the specified ooint of interest when performing audio inspections. Previously, there was a bug where the payload would not move and only point forward, thus requiring ANYmal to face the point of interest. Operators will now have a simpler process for setting up auditory inspections.