We are happy to announce that Release 23.04 is now available for your ANYmal. Here, you will find additional information about what we have introduced and changed. You’ll find several quality of life improvements within the ANYbotics Field Operator app and a few under the hood improvements.
New Features
Near Field Mapping
We are excited to introduce a significant improvement to part of our back-end software, the Elevation Map. With our new Near Field Mapping technology, you should expect to see significant performance improvement in subsystems that rely on the Elevation Map, most notably, the Perceptive Walk and Stair Climbing gaits. You should see improved performance on grated/metal stairs, grated floors, pallets, and more. We encourage you to report any changes in performance at your site.
In the event that you’d like to revert back to the current Elevation Map, simply add the following feature toggle to your .ros/config.yaml file on the LPC.
launch:
feature_toggles:
near_field_mapping_backend: elevation-mapping
ANYbotics Field Operator
We are continuing to improve what you can do with the ANYbotics Field Operator app to increase efficiency and capability throughout the operational lifetime of ANYmal.
Operators can now select an inspection object and start an ad-hoc mission from the Map page, similar to selecting a red inspection object in the 3D Visualization Panel of the Graphical User Interface (GUI). Now you can test newly set up inspection tasks while in the field instead of requiring the GUI, further reducing the reliance on the GUI during setup and accelerating your time to operation.
To do so, select an inspection object, then tap Load Ad-Hoc Mission. A play button will appear in the top left corner of the page. Press play, and the mission will start.
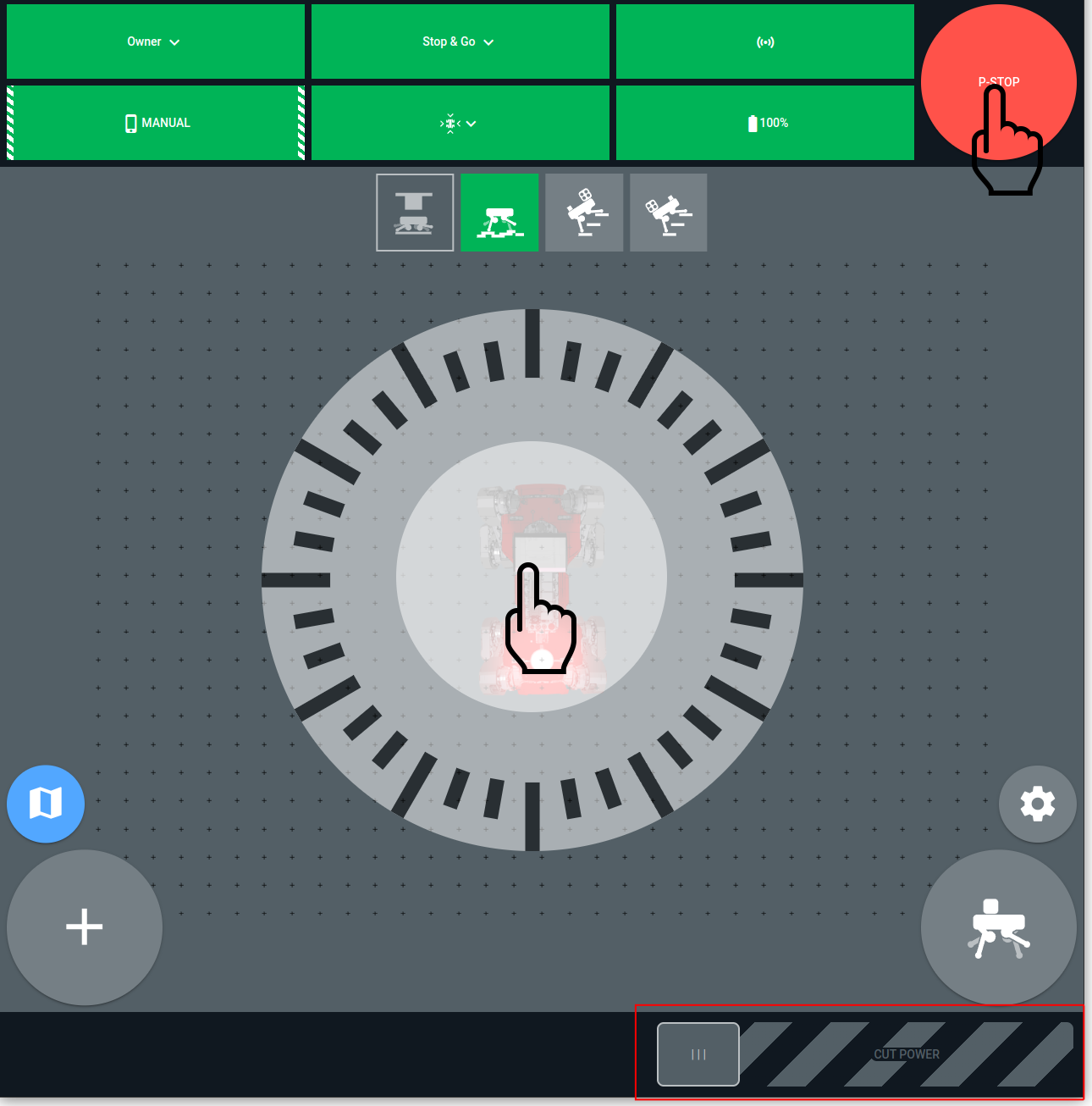
Additionally, safety behavior within ANYbotics Field Operator app has been fine tuned further. You can now register a protective stop (p-stop) with a second finger while steering ANYmal. This should allow Operators to quickly command ANYmal to safely stop with a hovering finger without first releasing the steering finger. The Cut Power slider, however, is disabled while ANYmal or its payload is being steered.
Important Changes
Improved low battery response
ANYmal’s reaction to a low battery warning is now more intuitive. Currently, if ANYmal receives a low power warning during a mission, ANYmal would simply pause and wait for Operator input. If the notification is not responded to for a significant period of time, ANYmal may simply run out of battery where it stands. With this update, ANYmal will now only wait for 3 minutes before it pauses the mission and autonomously returns to the dock. If the notification is reacted to, the Operator now has the option to dismiss the notification for 5, 10, or 15 minutes, or command the robot to return to the docking station immediately. If a mission was interrupted, it would need to be resumed manually.
Workflow Changes
ANYbotics Field Operator app
Operators now have finer control and monitoring capability of ANYmal when running autonomous missions. When ANYmal is performing a mission, you can now pause and resume the active mission from any page, instead of just the Mission page. This change allows Operators to monitor other ANYmal statuses, such as streaming a camera, while remaining only a tap away from stopping the mission if necessary.
During the setup of your environment, you can now additionally delete environment objects from your environment. When selecting an environment object in the map View, instead of directly showing the fields you can edit, you must choose between whether you wish to delete the object, edit the object, or start an ad-hoc mission of the object (inspection objects only).
Waypoints editor – Bidirectional mode will no longer create erroneous second edges
In the current Waypoint Editor, if you wish to edit a unidirectional edge and select it while in dual edge mode, then the reverse edge would be automatically created. With this release, we have patched this behavior to not create this additional edge. However, selecting an edge that is bidirectional when in single edge mode will continue to only select one of the directions.
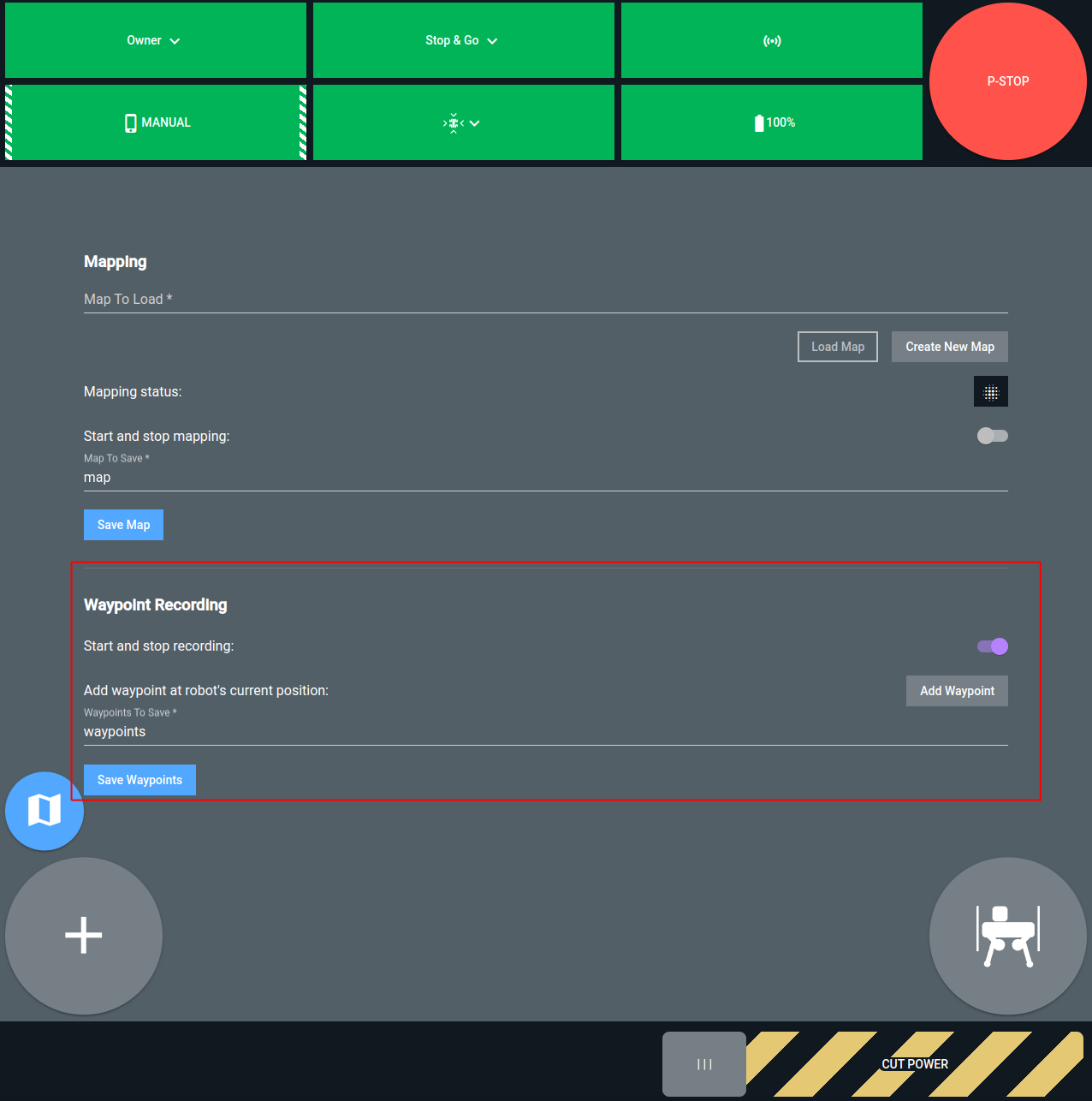
Waypoint Recording
Currently, using Waypoint Recording during environment setup creates many waypoints along the path that ANYmal has walked. We found that these waypoints do not lead to a functional waypoints graph and still relies on significant Operator tuning and cleanup to generate a high quality waypoints graph. Now, when Waypoints Recording is enabled, only when one of the following conditions are met will a Waypoint be recorded.
- The Operator clicks the Add Waypoint button from the Recording page
- The motion state has changed
- Collision avoidance mode has changed
Narrow corridors are now easier to configure
When configuring waypoints, you can now configure an edge to use Stop & Go in narrow corridors by using the narrow scenario parameter. To do so, you can currently select scenario, but you have to remember the narrow keyword in the Path Follower Parameters tab. Now, it is available as a drop-down menu, freeing up some mental load from the Operator setting up the waypoints.
Bug Fixes
PDB Firmware Update
A rare bug has been identified in the PDB firmware that occasionally prevented battery communication from re-establishing when lost. In addition to the software update, please update your PDB firmware. Instructions for doing so are available in the Operator’s Manual.
Software Related Random Collapses
We continue to identify and fix issues that result in random collapses and have significantly reduced their frequency in our internal testing that are software related. We highly encourage you to continue reporting any collapses you may experience with ANYmal by sending us logs (.bag and .silo files from LPC) from the time of the collapse.
Known Issues
Docking Alignment
In some corner cases, we have noticed consistent misalignment while docking on the docking station. We have introduced a temporary fix that should make it more reliable, but it is still not 100%. The root cause is still under investigation.