Release 25.09 is now available for your ANYmal! We’ve been hard at work developing new features and enhancements to optimize your ANYmal experience. Here, you’ll find detailed information about what’s new in this release.
New features
Data Navigator
- Mission Controller
- Asset Comparisons
- New Inspection Types
- Detailed Reports
- REST API 1.0
- Comprehensive Inspection Previews
- Refreshed Assets Monitor
- Streamlined Mission Scheduling
ANYbotics Field Operator App
- Initial Guess Requirement for Improved Localization
- Configurable Emissivity for Thermal Inspections
- Convenient Environment Mapping
- Centralized Robot Settings
- New Initial Task Behavior
Gas Presence & Leak Detection
Deprecation Notice
The Graphical User Interface (GUI) and the gRPC-based API and SDK will be deprecated and removed in early 2026. After deprecation, these components will no longer receive updates, maintenance, or compatibility support in future releases, and the gRPC API will be fully removed from upcoming server versions.
To ensure uninterrupted access to supported interfaces and new features, we strongly encourage users to migrate to the Data Navigator REST API within the next six months.
For migration assistance and detailed information, contact your ANYbotics representative.
New Features – Data Navigator
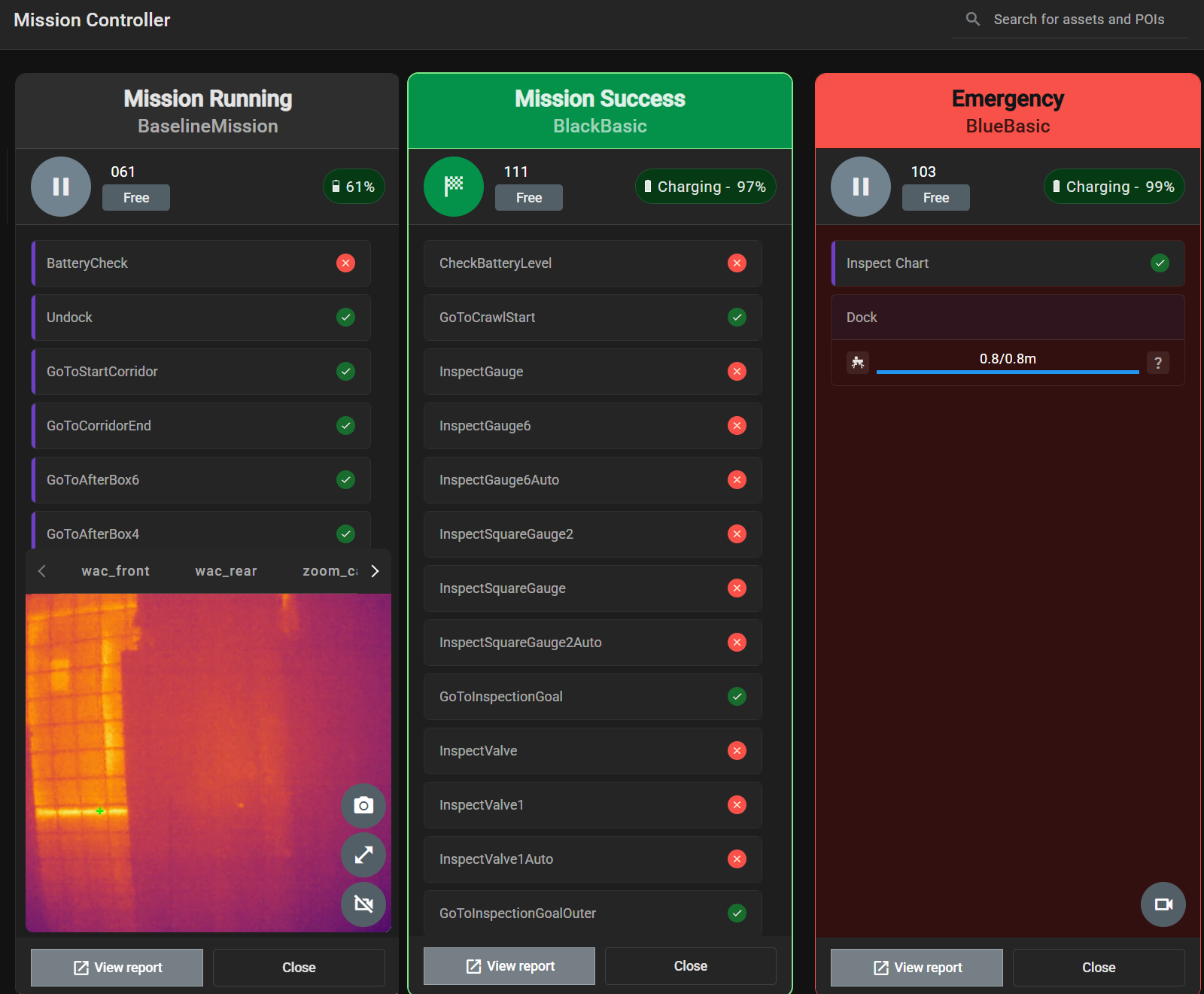
Mission Controller
The new Mission Controller feature allows you to supervise and control your robots’ missions in real time. You can monitor mission progress and task outcomes, view livestreams from the robot’s cameras, start, pause, and resume missions, and more. Mission Controller also shows the robot’s battery levels and sends notifications when issues occur with the robot or its environment.
By centralizing mission oversight, Mission Controller makes it easier to manage robots in real time and enables rapid intervention during their autonomous missions.
For more information, see Control missions in the Data Navigator User Guide.
Asset comparisons
You can now set up asset comparisons in Data Navigator, which enables you to compare data and inspection results across multiple points of interest. This functionality provides an easy way to identify trends, deviations, and potential problems in your equipment. You can view thermal, visual, gas, and other inspection images, videos, and recordings side by side or analyze trendlines to detect performance issues.
Asset comparisons are set up in Assets Manager. You can create either trendline or inspection comparisons and add up to six points of interest per comparison. Once created, comparisons can be marked as favorites in Assets Monitor for easy access.
For more information, see Set up asset comparisons in the Data Navigator User Guide.
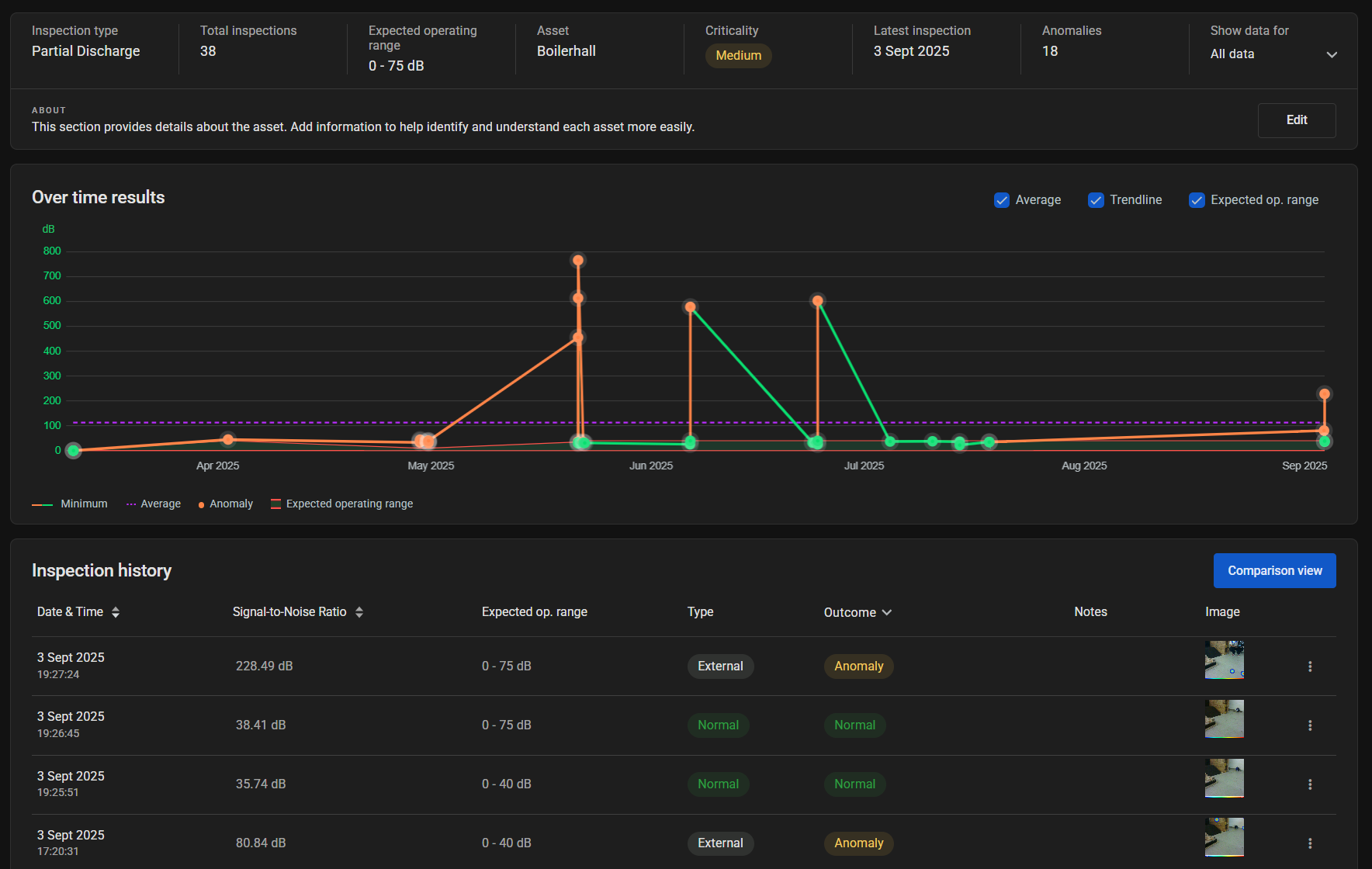
New inspection types
You can now review Frequency Analysis and Partial Discharge inspection types in Data Navigator.
Frequency Analysis detects failures through anomalous noise and acoustic patterns. It uses FFT analysis and SNR trend tracking to identify issues that are otherwise difficult to detect. You can also use the comparison view to compare recordings over time. This inspection type supports proactive maintenance through early detection and can be used, for example, to identify bearing failures, broken motor fans, and pump cavitation.
Partial Discharge identifies and classifies partial discharge events, including corona, void, and surface PDs. It uses acoustic sensing and anomaly detection to pinpoint the location and severity of PD events, which supports early intervention and targeted maintenance.
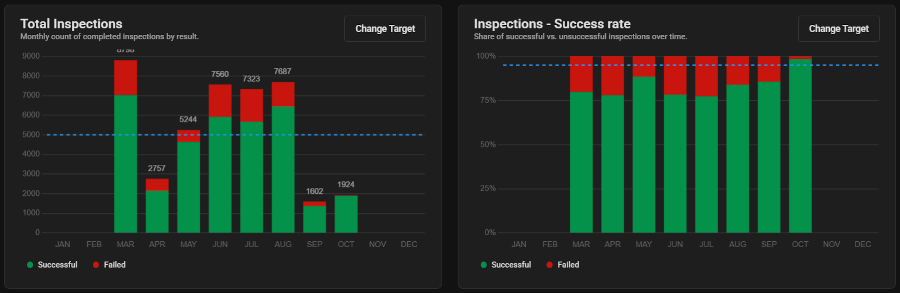
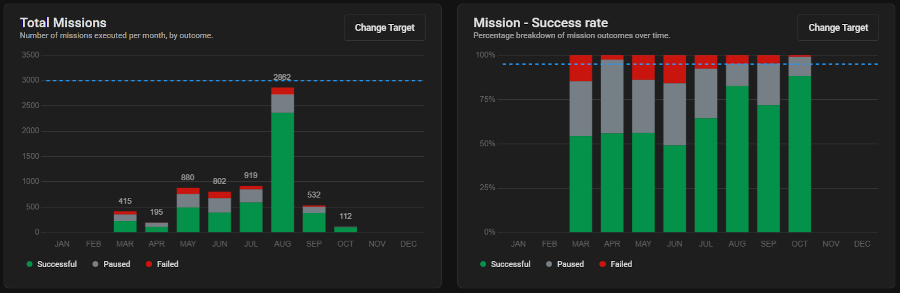
Detailed reports
Assets Monitor now includes detailed reports that provide comprehensive insights into asset conditions, inspection and mission performance, and robot activity. They bring together key performance indicators to help you monitor reliability, identify recurring issues, and streamline operations. Access detailed reports from Assets Monitor.
For more information, see Detailed reports in the Data Navigator User Guide.
REST API 1.0
We’ve released the Data Navigator REST API 1.0, a RESTful interface that provides access to inspection, asset, and mission data collected from the robot. The API allows users and integrated systems to retrieve, filter, and analyze inspection results, anomalies, and performance using standard HTTP requests with JSON responses. The API is designed to make it easier to connect the robot’s data to external tools and other systems.
To access the API, you need to authenticate using an API token. Tokens authorize your requests and define the API endpoints that you can access.
For more information, see Data Navigator REST API 1.0 in the Data Navigator User Guide.
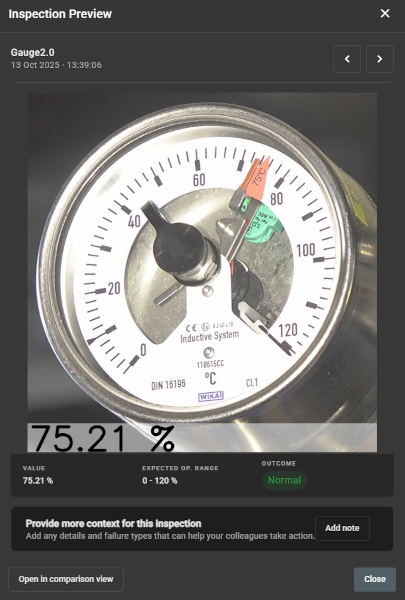
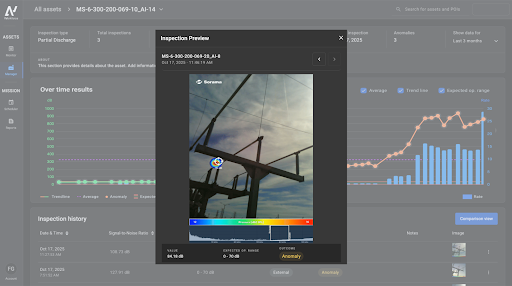
Comprehensive inspection previews
Inspection previews have been overhauled to improve information display and navigation, making it easier to review inspections quickly when you don’t want to open full mission reports. Inspection previews can be opened from the Over Time Results and Inspection History sections in Assets Manager. Depending on the inspection type, the previews display thermal, visual, or acoustic data. Additional new features include:
- For thermal inspections, a region of interest toggle and ability to flip RGB thermal images to visual images
- Frequency bands in Hertz for acoustic inspections
- Notes field to add additional context for inspections (e.g., why an inspection failed or environment details)
- Navigation arrows to switch between inspection previews
For more information, see Inspection previews in the Data Navigator User Guide.
Refreshed Assets Monitor
The Assets Monitor has been updated to provide better insights into asset performance and inspection data. You can now assign criticality levels to assets, which makes high-priority equipment more visible and easier to monitor. Criticality level can be used to sort lists, filter reports, and flag anomalies, which helps ensure that important issues are highlighted first.
Additionally, Assets Monitor now supports user-defined time windows and asset filtering, which gives you more control over how data is visualized and analyzed.
Streamlined mission scheduling
The Mission Scheduler has been updated to improve ease of use, clarity of information, and operational efficiency. The following improvements were made:
- Active missions now have links to Mission Controller so that you can monitor their progress in real time
- Messages appear to explain why missions failed and include recommended actions
- A new time-based drop-down list makes mission start times easier to select
- Colors now have more contrast to improve visibility
New Features – ANYbotics Field Operator app
Initial guess requirement for improved localization
Setting an initial guess is now required before you can enable localization in the ANYbotics Field Operator app. To support this functionality, the app now has a Set Initial Guess marker.
An initial guess gives the robot an approximate starting position and orientation in its environment. Using this starting point, the robot can determine its location more reliably, which reduces the risk of improper localization and the need for readjustments. This improvement allows the robot to get up and running quickly so that it can perform its assigned tasks.
For more information, see Localize the robot in the Operator’s Manual.
Configurable emissivity for thermal inspections
You can now configure emissivity for thermal inspections, which enables more accurate and reliable temperature measurements for a wider range of materials. This feature also improves consistency across inspections, making it easier to see trends and spot changes when comparing inspections over time. When setting up a thermal inspection, you can enter emissivity values between 0.01 and 1.00. Emissivity data is also now included in reports.
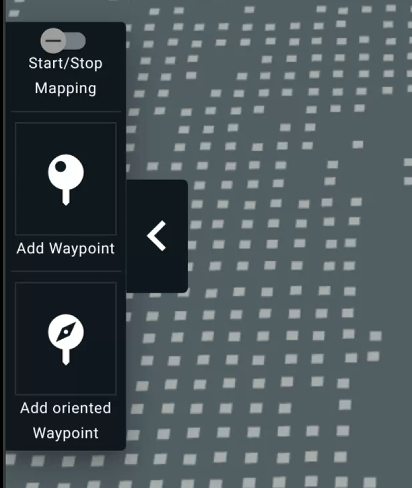
Convenient environment mapping
The drawer menu on the left-hand side of the app now contains a Start/Stop Mapping toggle, which provides more granular control when mapping the robot’s environment.
Previously, mapping was done from the Mapping page, and you had to load this page each time you wanted to change the mapping status. The Mapping page is still supported, with the new Start/Stop Mapping toggle simply offering a quicker, more convenient way to map the robot’s environment.
For more information, see Record maps in the Operator’s Manual.
Centralized robot settings
The new Robot Settings page in the app lets you manage aspects of ANYmal’s behavior from one convenient location. To access Robot Settings, select the three-line menu in the app’s bottom left corner. There are currently two settings:
- Robot should dock when connection is lost: When enabled, the robot docks whenever it loses connection with the tablet.
- Global Replanning: Controls how the robot behaves when its planned path is blocked by an obstacle. When enabled, if the robot is blocked for a certain amount of time, it plans another path to reach its destination.
New initial task behavior
Now, when you pause and resume missions with an initial starting task, the mission resumes at the next chronological task in the list. Previously, the mission restarted at the initial starting task.
New Features – Gas Presence & Leak Detection
For customers using our Gas Presence & Leak Detection solution, this release contains new features for acoustic imaging. If you’re interested in learning more about this solution, see the Gas Presence & Leak Detection Guide.
Partial discharge detection
ANYmal can now detect partial discharges when equipped with the acoustic imager. Partial discharges (PD) are localized electrical discharges on or in high-voltage insulation. PD indicates early insulation deterioration in transformers, switchgear, cables, and motors. Over time, repeated partial discharges can degrade materials, leading to eventual equipment failure.
Monitoring and measuring partial discharge activity helps avoid unplanned outages, improves safety, and extends asset life by enabling condition-based maintenance.
You can view partial discharge events in real time using the robot’s cameras or schedule recurring inspections and review the results in Data Navigator.

Define regions of interest for acoustic imaging
In the ANYbotics Field Operator app, you can now define regions of interest when streaming acoustic imaging video while controlling the robot’s payload. To use this functionality, draw a rectangle over the area that you want to focus on. The rectangle becomes the Region of Interest (ROI), and the acoustic data that it returns is specific to that region.
Configurable sensitivity levels
You can now set default sensitivity levels for acoustic imaging inspections. If needed, you can change the sensitivity level while streaming.
Fan slowdown during inspections
To reduce noise, the robot’s fans now slow down temporarily during auditive and acoustic inspections. This only occurs when recordings are shorter than 13 seconds and within acceptable temperature limits. You can disable this behavior in .ros/config.yaml.
Improvements
Distance information for thermal images
Thermal images in Data Navigator and the API now include the distance to the inspection target, enabling more accurate RGB-thermal contextualization.
Improved camera resilience
The zoom and thermal cameras are now better at recovering from failures or temporary disconnections
Changes
Zoom camera compatibility
Thermal images in Data Navigator and the API now include the distance to the inspection target, enabling more accurate RGB-thermal contextualization.
Moved API fields
Moved the desired_frequency and frequency_expected properties from the AuditiveFrequencyAnalysisInterpretation API structure to a new configuration field, which now includes additional details.
Fixes
Fixed an issue that caused the robot to block the wrong path segment during global replanning, which prevented the robot from reaching its goal.