At ANYmal Research, we closely collaborate with our partners to extend ANYmal’s capabilities, a quadrupedal robot designed for autonomous operation in challenging environments. Our community is made up of hundreds of contributors, from university labs to corporate innovation centers, that share and publish their work to advance legged robotics research.
Robotic Research With Quadrupedal Robots
Many of our ANYmal Research partners pursue the goal of helping robots understand and navigate the physical world by integrating them into complex real-world environments. To test and succeed in unstructured and diverse setups, robotics researchers need a practical, suitable and field-ready system that is capable of dealing with challenging conditions. As a four-legged robot, ANYmal benefits from the versatile quadrupedal motion combining stability in rough terrain and highly-dynamic motions such as running. To support our partners in achieving their tasks in environments varying from complex industrial facilities and hazardous underground surroundings to natural unstructured terrain, the ANYmal robot platform provides an extensible software and hardware architecture.

ETH Zurich testing ANYmal C’s advanced locomotion capabilities in unstructured natural terrain. Image credits: ETH Zurich, Robotic Systems Lab.
Extensible Ros-based Software Stack
The simulation software for ANYmal enables researchers to validate new approaches and concepts in a fast and flexible way. The framework builds upon the physics-based Gazebo simulator and is fully compatible with the Robot Operating System (ROS). It features a user interface and a rich set of visualization, logging, and debugging tools: “A new student can come and start research on ANYmal almost immediately. This used to take years and significant investment in the past.”, said Prof. Dr. Marco Hutter, Professor for Robotic Systems at ETH Zurich.
The ANYmal software includes the state estimator, perception sensors, and the control, navigation, mapping and localization algorithms. Since most of the code is provided and shared as source code, partners can modify the software to their needs. This way, researchers can develop complex and integrative algorithms. Regarding the EU H2020 project THING, Dr. Krzysztof Walas, Professor at Poznan University of Technology, stated: “Since we mostly work on perception, we could leverage the ANYmal Research community and receive the necessary data right away. Even before receiving the ANYmal robot, we were able to send the program we did in the simulator to one of the research partners that ran it on their ANYmal robot. In this way, we were able to start very quickly.”
Robotics research labs want to invest most of their time in performing experiments, gathering and analyzing data. With ANYmal’s simple setup requiring only a laptop, the robot itself and a battery charger, “we can just pack the robot and go anywhere to perform our experiments and gather the data we need.”, added Dr. Krzysztof Walas.
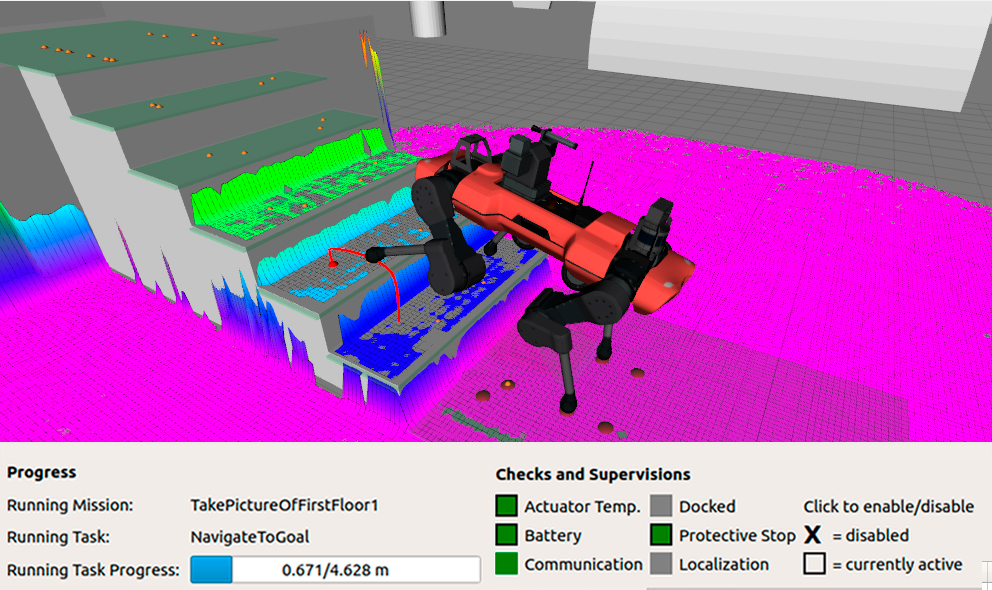
Easy testing of custom software in simulation and on the physical robot (user interface based on RViz and RQT).
Extendable Hardware Architecture
As a multi-purpose robot platform, ANYmal is able to tackle a wide range of applications. Not only is the software interfaced with a wide range of APIs, but it also presents an extendable hardware architecture allowing additional sensors or tools to be mounted. “We mounted a 2 kg radiation sensor payload on the top of the robot that allowed us to make the needed measurements for one of our special projects.”, told us Dr. Maurice Fallon from Dynamic Robot Systems Group of the University of Oxford.
For the DARPA subterranean challenges, targeted to roboticise operations in the underground, the ETH Zurich’s Robotics Systems Lab integrated additional cameras and sensors to find artifacts and deploy network amplifiers on the ANYmal platform. The group also works on extending the robot with wheels and with manipulation capabilities for dynamic interaction tasks such as lifting objects or opening doors.
With ANYmal C’s new application interface our research partners have access to the robot’s built-in application computer, which allows them to develop their own payloads. The interface system supports mechanical loads of external payloads and several water-proof plugs for power and communication interfaces (USB & Ethernet).
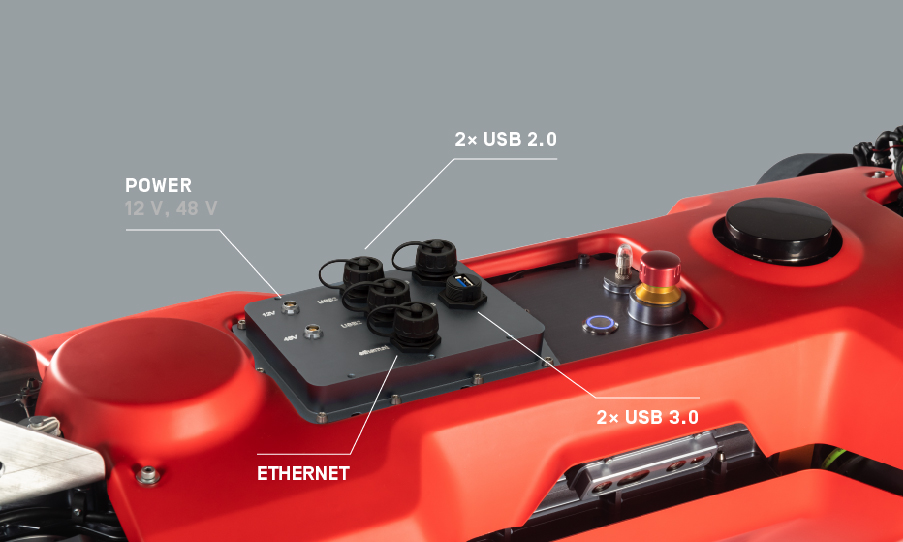
The new power and communication interface for additional payload development.
An Impressive Timeline to Achieve Results
Research projects vary in pace and complexity, yet it’s always essential to work with a straightforward and reliable platform. Within only eight months, our research partners from Oxford Dynamic Robot Systems managed to create an impressive number of 6 international quality research papers accepted at ICRA/RA-L 2020. Papers were entirely based on ANYmal Research and covered topics that ranged from efficient learning of locomotion, active mapping, SLAM, path planning, state estimation and trajectory optimization. “This result illustrates that a variety of different research topics can be done on the ANYmal platform”, said Dr. Maurice Fallon, as summarized in the video below.
A Collaborative Approach to Robotics Research
“The challenges the future holds for real-world robotics applications are so complex that no researcher, research group or organization can solve them in their own capacity. Consequently, we believe multidisciplinary collaboration is needed to further advance robotics research.”, concluded Prof. Dr. Marco Hutter. Through the ANYmal Research forum and code-sharing platform, ANYbotics provides the necessary tools to facilitate the collaboration of mobile robotics researchers throughout the world. “We received immediate access to very good documentation and the discourse forum where you’re able to ask questions, report problems or understand why certain decisions are made. A lot of work from ANYbotics goes into ensuring compatibility.”, said Dr. Maurice Fallon.
The ANYmal C Legged Robot Platform
ANYbotics’ current robot version, ANYmal C, is designed as a modular and flexible high-end platform for the most advanced robotics research. Providing extreme mobility, ANYmal C is powered by torque-controlled actuators with a 40% higher torque-to-weight ratio compared to its predecessor. Four depth cameras in combination with a LIDAR allow a 360° obstacle detection, large-scale localization and autonomous navigation. The new front and back wide-angle cameras provide a high-res global-shutter colored image and are hardware-synchronized with the onboard Inertial Measurement Unit (IMU) for the application of visual-inertial-based algorithms. ANYmal C hosts three onboard computers out of which one is fully available for custom software and provides, with its new Intel i7 processors, a 3x increase in computation capability. Optionally, ANYmal C can be equipped with an NVIDIA Jetson AGX Xavier graphics card for deep learning and computer vision applications. The latest ANYmal C software release provides improved stair climbing capabilities and new inspection and mission planning frameworks with a plug-in architecture for easy extensibility.
Joining the ANYmal Research Community
For more information visit www.anymal-research.org. Contact us if you are interested in working with ANYmal and would like to receive more information about the ANYmal Research community.