Robotics that revolutionizes the heavy industries
Creating a workforce of
autonomous robots
From the first prototype until today, the team of robotic experts behind ANYbotics is guided by what creates value at the site of deployment: our solutions aim to support large asset operators around the world to reach their ambitious goals in safety, sustainability, efficiency, and profitability.

Build the future of robotics
together with us
Our A-team are curious and ambitious minds who strive for excellence in everything we do. We created Real Impact, strived to be Pioneers and One Team, and took Full Responsibilities long before we made this practice our official cultural values.
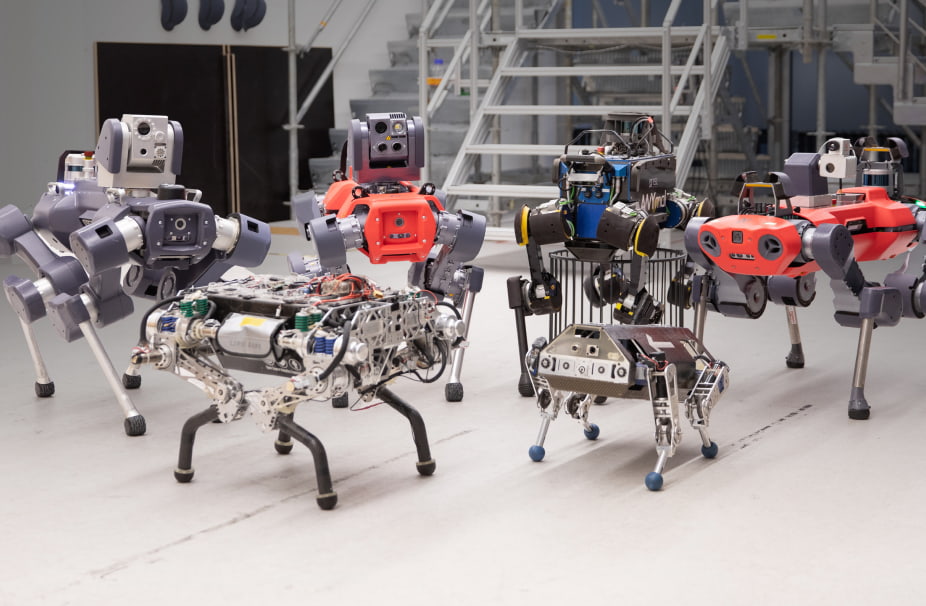
Robotic leader thanks
to strong alliances
ANYbotics was founded in 2016 as a spin-off from ETH Zurich, and realized first sales in 2017, supported by global innovation leaders like Petronas, Shell, BASF and world-class investors Walden Catalyst, NPG Capital, Bessemer Venture Partners, Aramco Ventures and Swisscom Ventures, among others.